














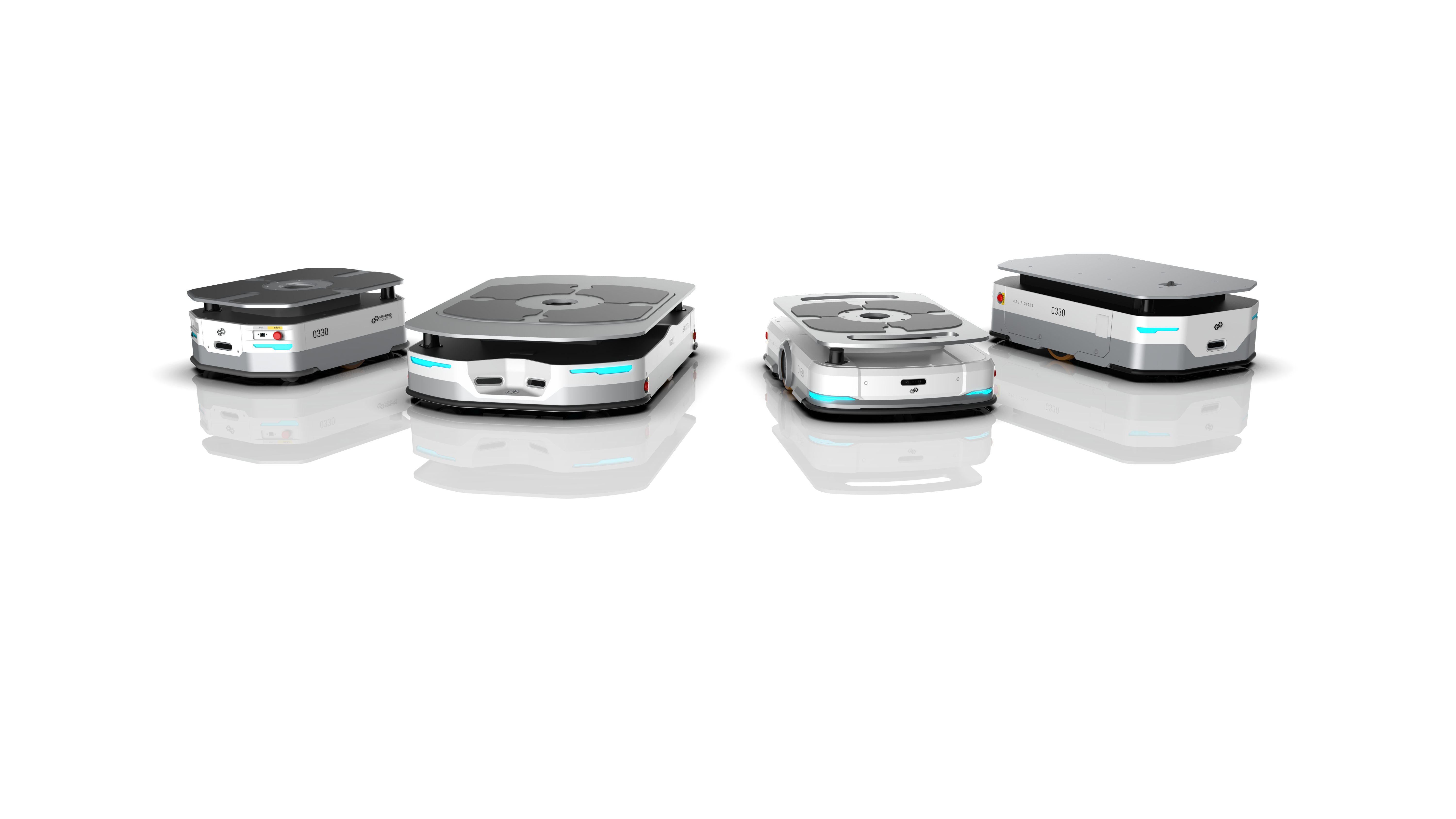

OASIS 300E-SRL
机器人潜伏到载具下方以背负转运货物,自动取放货,自动搬运,高效智能
对角双雷达
雷达布局
740*545*285
尺寸L*W*H(mm)
300
最大载重(kg)
激光SLAM
导航方式
±10
站点定位精度(mm)
8
续航时间(h)







